#19 山内 淳矢先生
junya_yamauchi

富山大学 研究者インタビュー#19
2024年10月23日08:00

人間とロボットが
共存する未来へ
山内 淳矢先生
富山大学 学術研究部工学系・准教授
山内淳矢先生は、自律ロボットの実現を目指したサイバーフィジカルシステムの研究をしています。
山内淳矢先生は2024年4月に東京大学から富山大学に赴任され、人間とロボットが共存する社会を目指した研究開発に取り組まれています。先生が専門とするシステム制御工学は数学をベースとした学問です。「現象を数学的に捉えて、それを数学的に考えて実際に使える形で出力するというのがシステム制御の考え方です。物事を科学の基礎である数学で表現するというのがとても面白いと思いました。」
現在室内や障害物の少ない場所でロボットは活用されていますが、今後は工事現場や農場、森林など、過酷な場所での使用が求められています。それを達成するために必要なものが『自律性』だと山内先生は考えています。
「動物の行動を例に考えると、森の中など複雑な環境の中で獲物を捕えたり、敵から逃げたり、目的を達成する必要があります。障害物にぶつからないとか、体力を切らさないなど、様々な制約を満たしながら目的を達成する能力が『自律性』です。」
『自律性』の実現には、ロボットを情報(サイバー)と物理(フィジカル)が密接に連携して構成されるサイバーフィジカルシステムとして捉えることが重要だといいます。ロボットは、情報を処理し意思決定を行うソフトウェアと、モータ・センサ・計算機などのハードウェアから構成され、それぞれの技術が日々進化しています。これらの最新技術を融合させて高度なサイバーフィジカルシステムを構築していくことが、目指す『自律性』実現への道標になると先生は考えています。
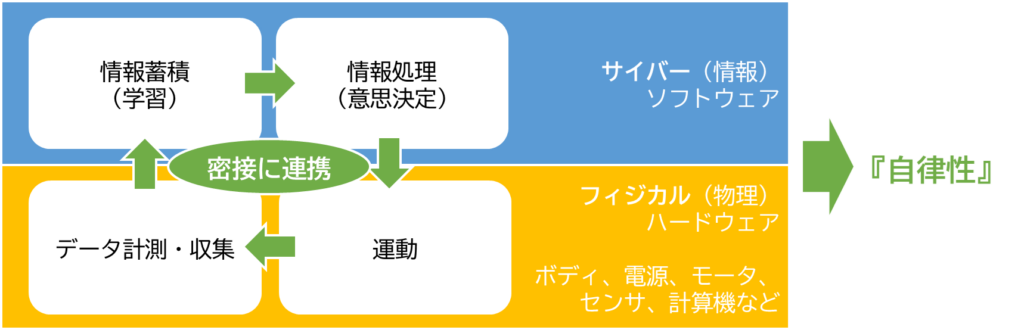
図1. 自律性の実現に向けたサイバーフィジカルシステムの概念図(筆者作成)
技術的には、『自律性』は以下のような機能に細分化されます。
これまでの研究は、機能一つ一つを切り取って、条件などを小さく絞り込んでから問題を解くというものが主流であり、そういった研究を積み重ねることで各機能の技術レベルは大きく向上してきました。そして現在は各機能を統合しようという研究が活発になっているそうです。これらの機能から得られる出力を統合して、ロボット自身が「この状況でこの運動はできるのか」と考え、調整していく。考える内容が高度になればどんな場所でも活躍できる『自律性』を持つロボットが生み出せると先生は考えています。
このように自律性を持ったロボットが誕生しても、限られた技能を持つ人しか扱えないようでは、真の役割を果たせません。「現在もインフラ点検をドローンで行おうという取り組みはありますが、一番の問題はインフラ点検の知識のある人がドローンを扱う技能を習得するというところにあります。そのような人材を育て上げるのはハードルが高いため、例えば慣れ親しんでいるゲームコントローラーのような人間と協調しやすい仕組み作りが重要です。」山内先生はこの問題の解決に向けて、人間の行動を機械学習によりモデル化し制御に活かすための研究に取り組まれており、2020年には国際自動制御連盟(IFAC)が主催するワークショップCPHS(Cyber-Physical and Human Systems)で最優秀研究論文賞を受賞されています。
山内先生は研究内容の応用先として、野生動物による人的被害対策を想定しています。特に富山県などでは市街地に熊などの野生動物が侵入し、人命に危害が及ぶ事件が後を絶ちません。人口減少による里山の藪化は今後も進むと考えられ、より市街地に近い場所に野生動物の生活範囲が広がることが予想されています。また、ツキノワグマなどは保護法で管理されており、狩猟することができないため人的被害をさらに広げてしまうケースもあります。この問題の解決に向けて、ドローンで野生動物を追い払うシステムの構築を目指されています。
「ドローンは上空から広範囲を赤外線カメラで見て、温かい場所(動物)を見つけます。そして光や音などを使用した効果的な方法で、対象を見失わないように市街地の外に誘導し、効率よく追い払うことができます。これを社会で使えるようにするためには対象とする動物の特性を理解し、実際に外で実験してブラッシュアップしていく必要があると考えています。」
この技術が確立されれば、ドローンに定期的にパトロールをさせたり、熊の目撃情報が出たら飛ばして追い払ったり、というような対策が迅速に行えるようになります。鳥類などの他の動物にも応用することで空港付近でのバードストライク防止や、食品工場への侵入防止などにも広く活用できると考えられます。
「ロボットの用途をさらに広げるには、私が研究しているソフトウェア面以外にもハードウェア面や計算機の面など広い分野と協働して高度なサイバーフィジカルシステムを作り上げていく必要があります。また、『自律性』の理解を深化させることも必要です。人間を含む動物は自身が持つ様々な機能を統合して、制約に折り合いをつけながら行動していますが、そのメカニズムはまだ十分明らかになっていません。いつか街中で普通にロボットと人間が共存している風景を見るのが夢ですね。」
最近ではロボット掃除機や配膳ロボットなどの高性能なロボットが私たちの日常生活に溶け込み、ロボット技術の進歩を肌で感じることが増えました。近い未来、私たちに近い機能が組み込まれたロボットが登場することは間違いありません。先生の描く『人間とロボットが共存する街』のお話を伺い、これからは人間とロボットがお互いの弱点を補い合い、これまで解決が困難だった社会課題にも取り組むことができるようになるのだろうと、明るい未来を感じることができました。
(文責:学術研究・産学連携本部 コーディネーター 浮田)
【研究室が所有する知見や技術】
屋内用の車輪ロボットやドローンを所有している.また,ロボットの位置や姿勢をリアルタイムで取得するためのモーションキャプチャ環境を備えた実験室と計算機を所有している。
【リンク先】
富山大学研究者プロファイルpure https://u-toyama.elsevierpure.com/ja/persons/junya-yamauchi
山内淳矢先生個人ホームページ https://jyamauchi780.github.io/
▶researchmap https://researchmap.jp/jyamauchi/
共同研究等のご相談はこちらのOneStop窓口からお願いします。