INTERVIEW
研究者インタビュー

富山大学 研究者インタビュー#50
2026年3月23日

都丸先生は、生物、特に歩行者が群れで動く際の協調メカニズムを解明し、
その知見を将来的に群ロボットの制御へ応用することを目指して研究に取り組んでいます。
生物は群れの中で周りとうまく協調しながら運動しています。空を見上げると、ムクドリが大群で一斉に羽ばたくのは日常の中でよく見る光景です。人も同じです。大都市の交差点では、歩行者が密集しながら、ぶつかることなく行き交っています。一方、そうした大きな群れでは何かの拍子に大きな事故に繋がることも知られています。最近では2022年、韓国ソウルのハロウィンイベントで156名が圧死した事故は世界に衝撃を与えました。
生物が、群れの中で、どのようなメカニズムで衝突することなく互いに協調しているかはまだ明らかになっていませんが、近年の機器やカメラ、センサーの進歩によって、実際の体の回転や視線の動きなど、より精緻な分析・研究が可能となりました。2026年1月、富山大学工学部工学科機械工学コースに着任した都丸武宜先生は、群れはどのようなメカニズムで、事故を起こさずに安定して存在しているのか、群れの内部では何が起こっているのかという問いに挑んでいます。

図1 ミナミコメツキガニを用いた実験例。
小さな群れでは渡れなかった水たまりが、大きな群れになると渡ることができる。
(出典: https://doi.org/10.1371/journal.pone.0097870)
群れの研究は、前歩きをする珍しいカニの一種『ミナミコメツキガニ』を題材に始まりました。カニの群れの様子を観察・実験し、群れを再現するモデルの構築を試みました。
群れのモデルとして最も有名なものに、ボイドモデルがあります。これは、①他の仲間と遠かったら近づく、②ぶつかりそうなら避ける、③他の個体と向きをそろえる、という3つの簡単な規則に基づくものです。しかし、このモデルで作る群れは、適切なノイズ(ゆらぎ)を外から与えない場合、最終的に群れ内部での動きがない静的な塊として運動します。この点に、先生らのグループは違和感を抱いていました。
「従来モデルでは、『群れを作る力』と、『それを壊す力』の2つは対立関係にありました。しかし、実際の動物の群れを観察すると、集団としてまとまって動きながらも、内部では個体が頻繁に入れ替わっています。要するに、本来の生物の群れでは、内部に『ゆらぎ』がすでに蓄えられていて群れを作る力と壊す力が両立していると思ったのです。」
そこで、都丸先生らは、①お互いの動きを読みながら、それを基に自分の動きを決める『相互予期』、②個々がそれぞれのタイミングで動く『非同期性』、という2つの働きによって群れが形成されているのではないかと仮説を立てました。
現在、都丸先生は、相互予期と非同期性のメカニズムを検討するため、より介入しやすい歩行者研究に着手しています。中でも注目を浴びているのが、非同期性が頑強な組織化を作り出しているという研究結果です。
従来の研究では、歩行者が歩くタイミングを揃えることで前方の歩行者との衝突をさけているとしてステップの同期性が重要だと主張されてきましたが、これらは、一列に並んだ歩行者を対象とした実験系で得られた結果です。しかし、日常の歩行環境において、私たちが一列に並んで歩き続けることはほとんどなく、衝突を避ける際には横へ動くなど、二次元的な調整が可能です。
そこで先生のグループは、横断歩道を模した実験通路上での二次元的な歩行者集団のふるまいを調べる実験を行いました。対向して歩く歩行者にセンサーを装着し、二次元方向の歩行軌跡だけでなく、歩行ステップのタイミングと体の回転まで含めた身体運動を計測しました。また、同期性の影響を調べるため、テンポ音の有無を操作し、音あり条件ではテンポに合わせて歩くよう指示しました。
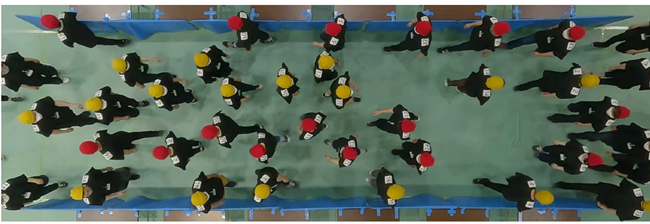
図2 対向した歩行者集団を用いた実験。
同じ色の帽子をかぶった歩行者は同じ方向に歩き、自然にレーンを形成する。
(出典:https://doi.org/10.1098/rsif.2024.0112)
その結果、外部からテンポ音を与えると歩行ステップは揃い、音のない条件では自発的にステップが揃うことはなく、非同期的に歩くことがわかりました(表1)。さらに、衝突の危険性を示す体の回転量は、音あり条件時の方が大きく、歩調を揃えるほど安定性は低下することが示されました。つまり、個々が自分のタイミングで歩く非同期性こそが、柔軟な調整を生み、集団の流れを安定させていると言えます。反対に、外的な制御による運動パターンの均質化は、本来備わる柔軟な調整能力を阻害する可能性があることも示唆されました。
表1 音によって歩行者の同期性を操作した実験条件と結果(筆者作成)
|
|
条件1 |
条件2 |
|
テンポ音 |
あり |
なし |
|
ステップ |
同期 |
非同期 |
|
体の回転量 |
大 |
小 |
都丸先生の研究成果は生き物だけでなく、自律分散型群ロボットの発展にも寄与する可能性が考えられます。自律分散型ロボットはその定義上、個体間の非同期的な相互作用が前提とされます。現在は『非同期性をなくす』という方向でロボット開発が進められていますが、非同期性が寄与する『群れ』としての頑健性を増すメカニズムが明らかになれば、逆にそれを活かすという方向でロボット開発を進めることができるかもしれません。
「集団で作られるシステムというのは、動物の群れ以外でも至る所で見られます。例えば脳は神経細胞の群れのようなもので、単体では持ち得ないような性質が集団としての相互作用によって、意識や心と呼ばれるものが生まれる。こういった不思議を解く糸口にもなると思っています。」
共同研究等のご相談はOneStop窓口からお願いします。
(文責:学術研究・産学連携本部 コーディネーター 浮田)
・富山大学研究者プロファイルpure
https://u-toyama.elsevierpure.com/ja/persons/takenori-tomaru/
・Researchmap
https://researchmap.jp/takenoritomaru
・プレスリリース:バラバラな足並みがまとまりある歩行者の流れを生み出す 〜頑健な組織化を促す非同期的運動の重要性〜
https://www.t.u-tokyo.ac.jp/press/pr2024-05-29-001
・プレスリリース:動きを読み合う歩行者たちの即興的な運動協調
情報工学・人間科学系 村上久助教らの研究グループは、動きを読み合う歩行者たちの即興的な運動協調を明らかにしました