研究シーズ
seeds

- ホーム
- /
- 研究シーズ
- /
- 検索結果
- /
- 山内 淳矢 「移動ロボットのための自律システム制御理論」
移動ロボットのための自律システム制御理論
| カテゴリ | 機械・ロボティクス |
|---|---|
| 研究テーマ | 移動ロボットのための自律システム制御理論 |
| 所属 | 学術研究部工学系 |
| 職位 | 准教授 |
| 氏名 | 山内 淳矢 |
| ReseachMap URL | https://researchmap.jp/jyamauchi/?lang=japanese |
| 富山大学研究者プロファイルPureURL | https://u-toyama.elsevierpure.com/ja/persons/junya-yamauchi/ |
| 研究分野 | システム制御,ロボティクス |
| キーワード | 自律システム,サイバーフィジカルシステム,システム制御,ロボティクス |
| 研究室URL | https://jyamauchi780.github.io/ |
| おもな研究内容 | 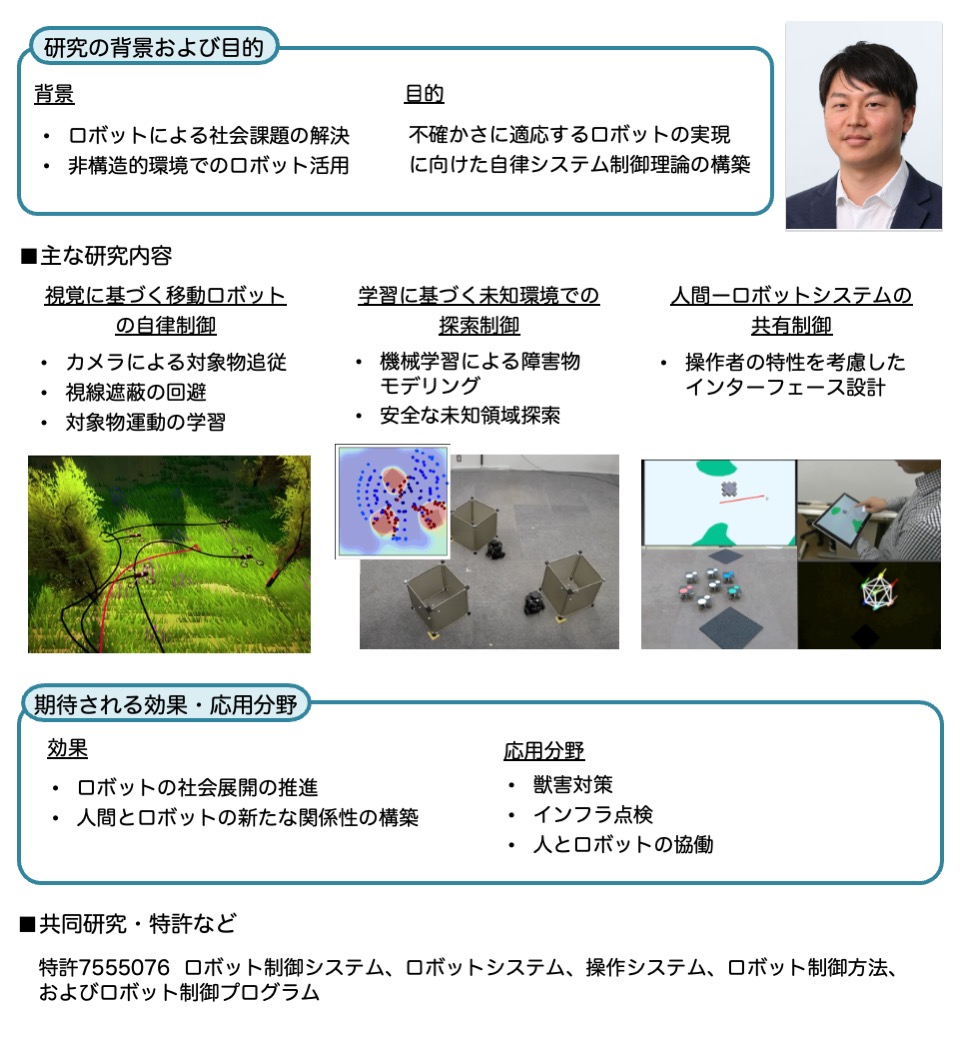
|
| 更新日 | 2026-03-31 |